Sample work
Wall-E
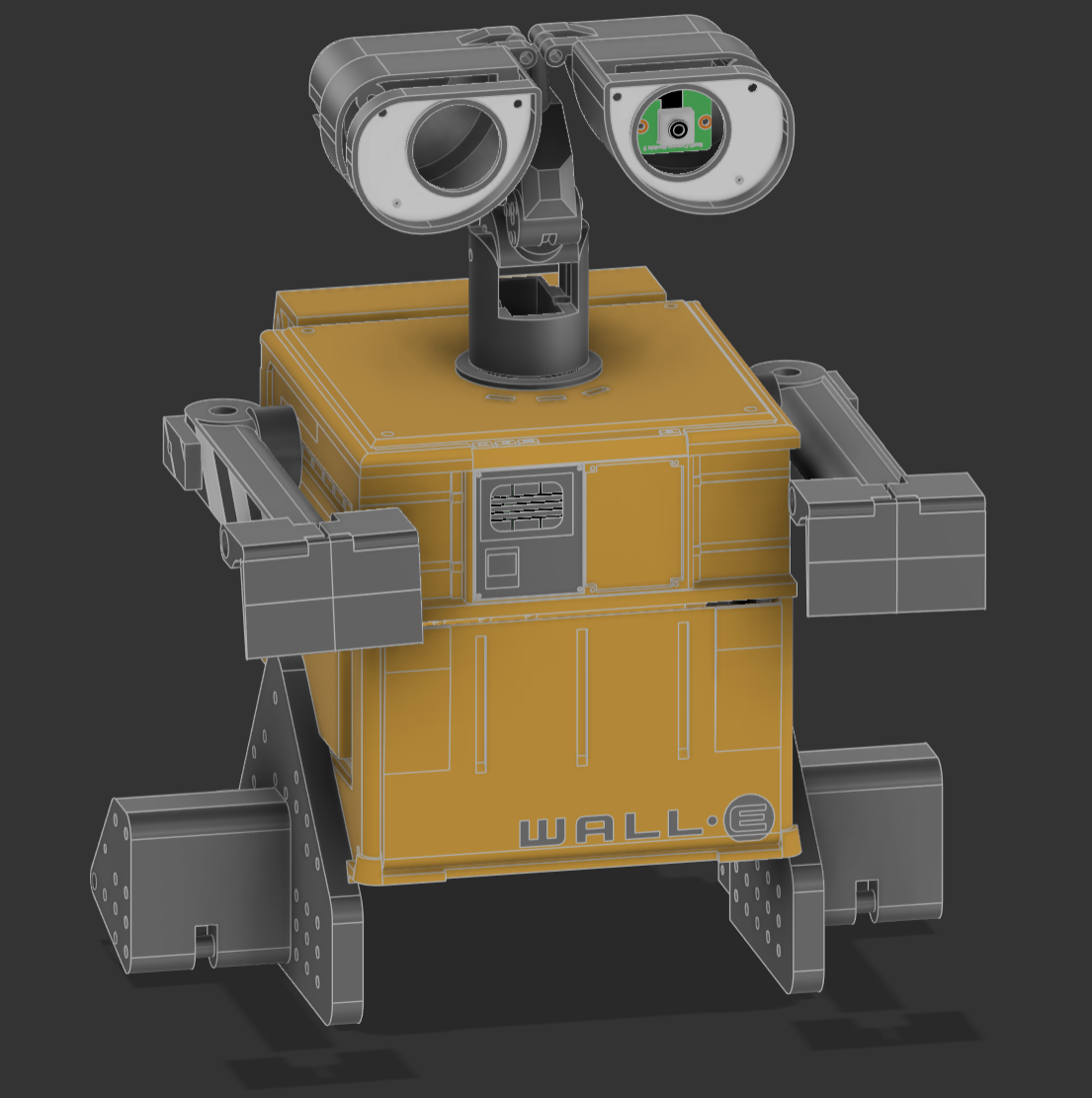
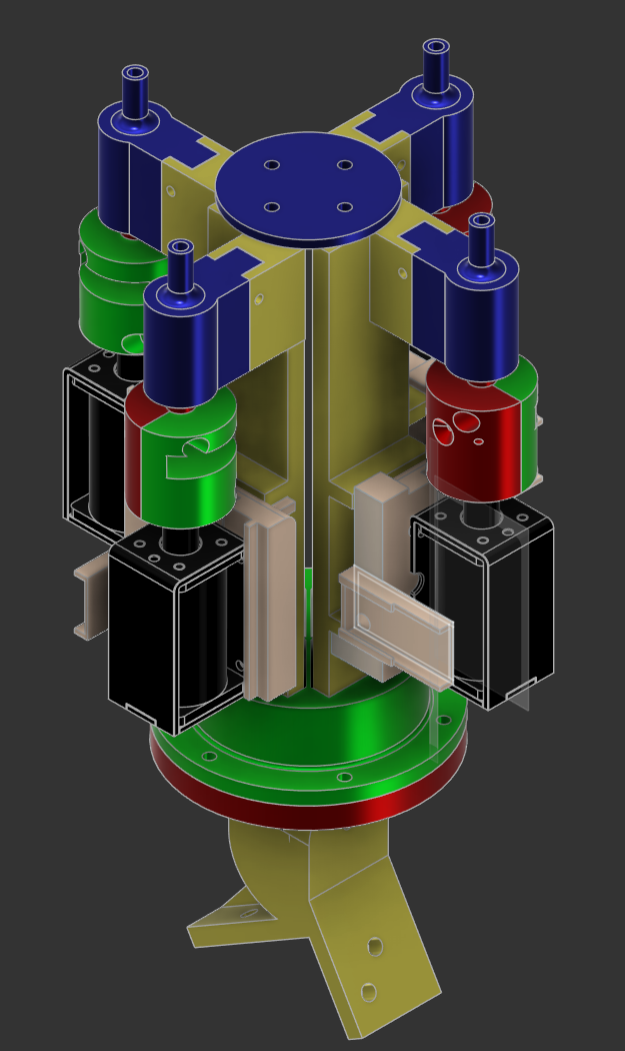
For fun, I built a functional wall-e robot. The robot has a servo motor built into the base of it’s neck which can rotate the head 180 degrees. A raspberry pi acts as the controller, the left oculus is fitted with a pi camera for RBG image data and the right oculus fitted with a time of flight distance sensor that can detect distances for obstacle avoidance.
A speaker system is built into the control housing for the characteristic sound effects from Wall-e. Finally, two NEMA-16 stepper motors with integrated drivers turn the drive sprockets of the tank treads, allowing for tight control of the Wall-E turning and movement.
Everything runs off Python and allows for autonomous movement around environments.
Piano Playing Robot
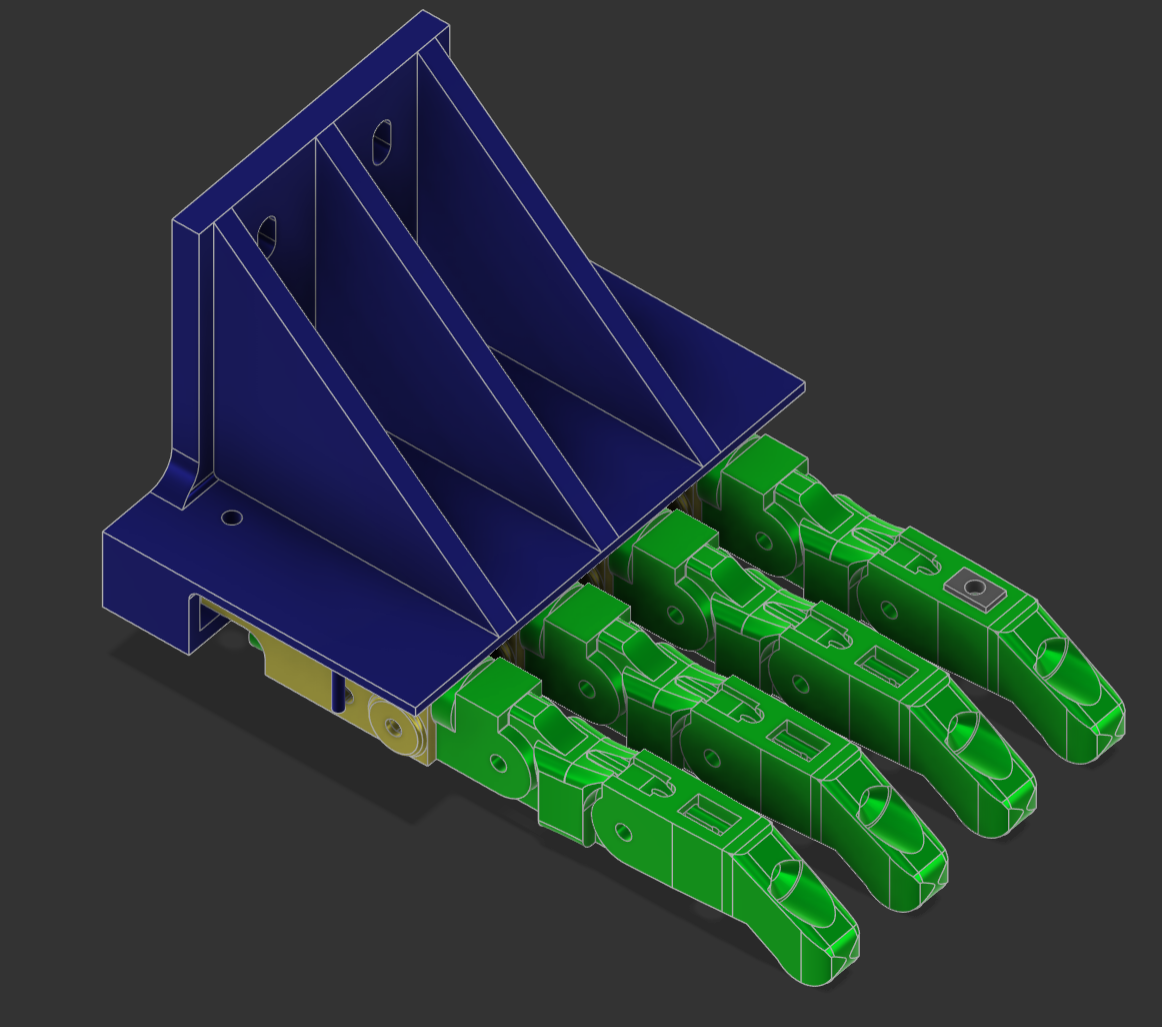
I have always been interested in Biomechanics, particularly in the human hand, so a project where a biologically inspired hand is used to play the piano was inevitable.
The hand is remodelled from an open source prosthetic hand ( Raptor Reloaded by e-NABLE ) but the hand was remodelled in fusion 360 to handle 0.5mm fishing wire and house a spring for the fingers to return to their zero position.
The actuators which drive the clenching of the fingers are 12V solenoids held in a pivoting mount. The solenoids drive the fishing line through plastic tubing so keep the overall hand weight down, mimicking the biomechanics of the musculature of the forearm pulling the tendons in the hand.
A more traditional linear rail and timing belt are used for lateral movement to position the robotic hand to the key locations.